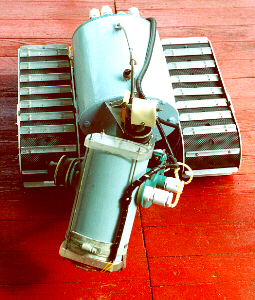
There is a single DC motor in each track. These motors are connected to electronic circuitry which operate them in a closed loop servo mode. The circuit receives a speed command from the operator which is compared to a feedback signal from the motor and the power to the motor is automatically adjusted to achieved the requested speed. This allows the tracks to maintain a steady speed regardless of the type of obstacle or terrain it might encounter. The arrow keys of the computer control speed and direction of the BROV. "UP" arrow makes both tracks move in the forward direction."LEFT" arrow makes the left track move in reverse and the right track move forward. The "DOWN" and "RIGHT" arrow keys work similarly. The length of time the particular key is held down determines the speed of the track motion. Hitting any other key stops all track motion. In practice, this system has been shown to be a very intuitive and effective way to control the BROV.
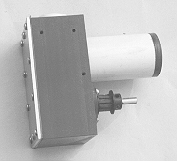
One sealed motor unit per track
Some Key Features Explained
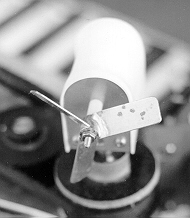
Camera:
The camera pod is designed to have an internal dimension to hold any of the many packaged video cameras which are typically 2X2 inches. It can also accomodate many board level cameras. I am now using a color high resolution board level camera with a horizontal resolution of 480 TV lines. This is a pretty meaningless number as the actual resolution will depend heavily on what kind of monitor being used and other factors. The bottom line is, when viewing the video tape on a standard television, the picture is excellent. The camera is Edmund Industrial Optics stock number F54-684.The lens is a VARIFOCAL lens E.I.O. stock number f55-254. This lens allows a large field of view while remaining in focus from about two inches to infinity.
Lights:
The lights are located flat against the camera pod lens and consist of four incandescant bulbs for a total of about 50 watts.This has been shown to provide good illumination for the camera. The lights are controlled from the computer and can only be used while the BROV in submerged or they will overheat.
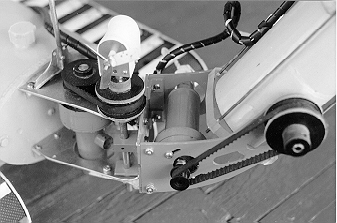
Pan and Tilt:
The pan motion moves about 160 degrees powered by a small DC motor. The motor is fitted with an overload clutch allowing the pan mechanism to hit the stops without damage. The length of the mechanism and the camera pod allows the camera to scan an arc about two feet across allowing views of large portions of the bottom without moving the BROV. During normal underwater use there is no visual reference to the body of the BROV itself making usefull a pan center sensor which indicates on the computer when the pan mechanism is centered. The pan mechanism moves about 300 degrees and has a similar overload clutch. It can look straight up straight down or backwards and any point in between. The pan and tilt are operated from the keyboard similar to the track operation. There is no perceptible delay between pressing a key and getting the motion.
Magnetic Compass:
The Precision Navigation Vector 2X Compass Module is an all electronic unit which is sold as an unpackaged circuit board. It is interfaced through the BROV communications modules and is displayed on the computer screen. The inherent accuracy of the compass is destroyed due to the powerfull permanent magnets in the drive motors. The BROV software includes a calibration utility to compensate for this. The proceedure requires the BROV to be placed on a calibrated turntable in order to face the unit at known headings. At each known heading you then take a compass reading which includes the error. Knowing the actual heading and the error the software builds a table of correction factors which are used during operation. This calibration only needs to be done once after any reconfiguration of the BROV.
Current Meter:
During the first use of the BROV I saw the "snow" blowing by the BROV at some astounding rate (or so it appeared) and that made me want to know what the actual rate was. The current meter is of the propellor type. The output of these are far more linear than the rotating cup type. The lower operating threshold of this unit is about .5 ft/second. It needs to be pointed into the current to be accurate as it does not weathervane. It is mounted on the pan unit and rotates with it. It outputs 8 pulses per rotation which are counted by the electronics and sent to the topside computer where the measurements are saved to disk. The measurement period can be selected and calibration constants applied.
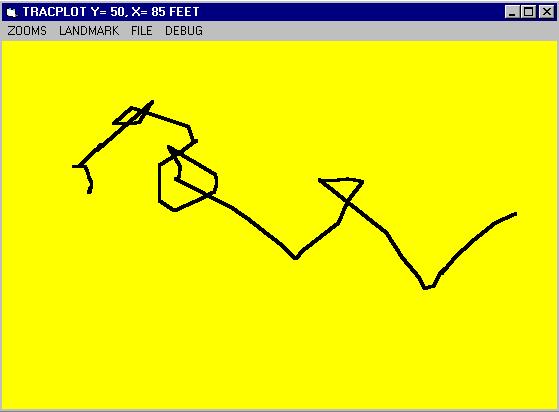
To aid bottom navigation the system is equipped with hardware and software to provide a real time plot of the movement of the BROV. The motion and direction of the tracks are measured by the electronics as is the heading of the BROV. The software uses this information to build a plot of the actual motion of the BROV on the computer screen. It is possible to use this plot to navigate the BROV accurately or to aid in doing a search pattern. Below is a screen shot of the track of an actual deployment. The very top of the window shows that the X dimension represents 85 feet and the Y dimension represents 50 feet. The opperator can zoom this window in or out to change these dimensions. The track data is saved into a file which can be replotted later.
Interfacing Sensors or Actuators:
The electronic package of the BROV is designed to allow easy interfacing of sensors of almost any type. There are four analog input channels that can measure any voltage or current either directly or with the addition of correct signal conditioning components. Sensors or systems that output a digital data stream either serial or parallel can also be accommodated by using spare digital channels in the BROV and the addition of proper software. Electromechanical devices can be accommodated by use of existing spare drivers in the BROV. These drivers can operate DC motors either forward or reverse as well as solenoid type actuators.
Leak Detection:
The BROV is equipped with leak detector probes in the main hull, camera pod, both track motors, the pan and tilt motors. These are probes which are two wires connected to electronics that detects any current flowing between them. This will happen if the probes are submerged. The output of the leak detectors are then read digitally by the computer. If a leak occurs a message appears on the screen indicating which module is affected.
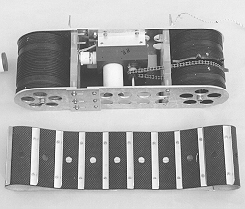
track unit with belt removed
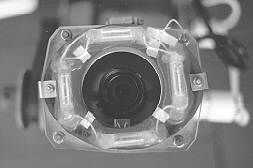
four lamps and the camera lens.
pan and tilt mechanism with motors,belts, sprockets and clutches.